
CSD5-02BX1 сервопривод Б/у 85% внешний вид нового Бесплатно Доставка - купить по
12600




Сохраните в закладки:






*История изменения цены! Указанная стоимость возможно, уже изменилось. Проверить текущую цену - >
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Feb-20-2026 | 502.57 руб. | 512.31 руб. | 507 руб. |
| Jan-20-2026 | 407.93 руб. | 415.72 руб. | 411 руб. |
| Dec-20-2025 | 494.68 руб. | 504.5 руб. | 499 руб. |
| Nov-20-2025 | 490.75 руб. | 500.41 руб. | 495 руб. |
| Oct-20-2025 | 391.13 руб. | 399.23 руб. | 395 руб. |
| Sep-20-2025 | 482.27 руб. | 492.14 руб. | 487 руб. |
| Aug-20-2025 | 478.65 руб. | 488.7 руб. | 483 руб. |
| Jul-20-2025 | 474.53 руб. | 483.84 руб. | 478.5 руб. |
Новые товары
Характеристики
Описание товара

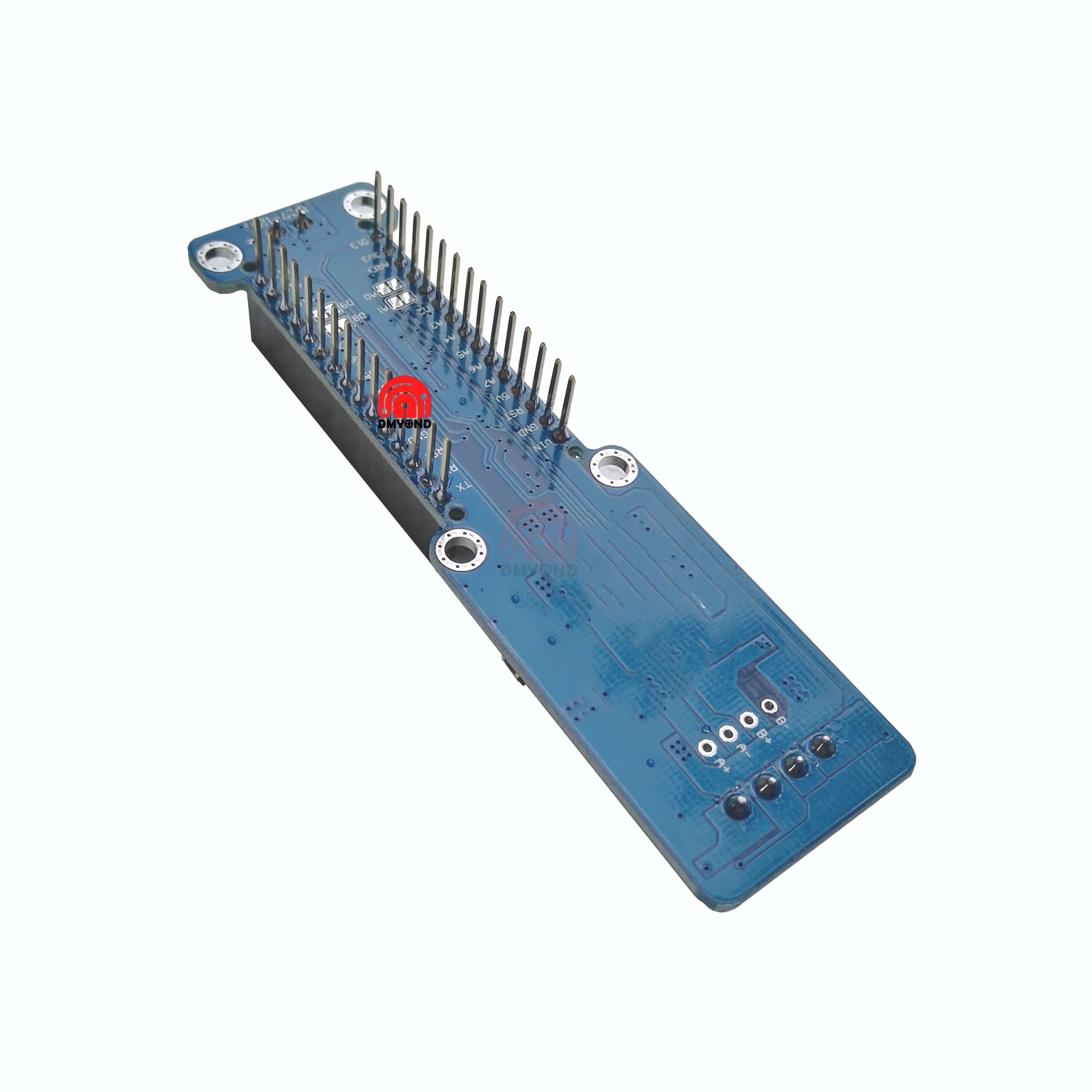
NANO 3,0 L298P DC Драйвер шагового двигателя Щит Модуль 5V-12V PWM локальной сети Ethernet запись данных РТК часы реального времени для Arduino
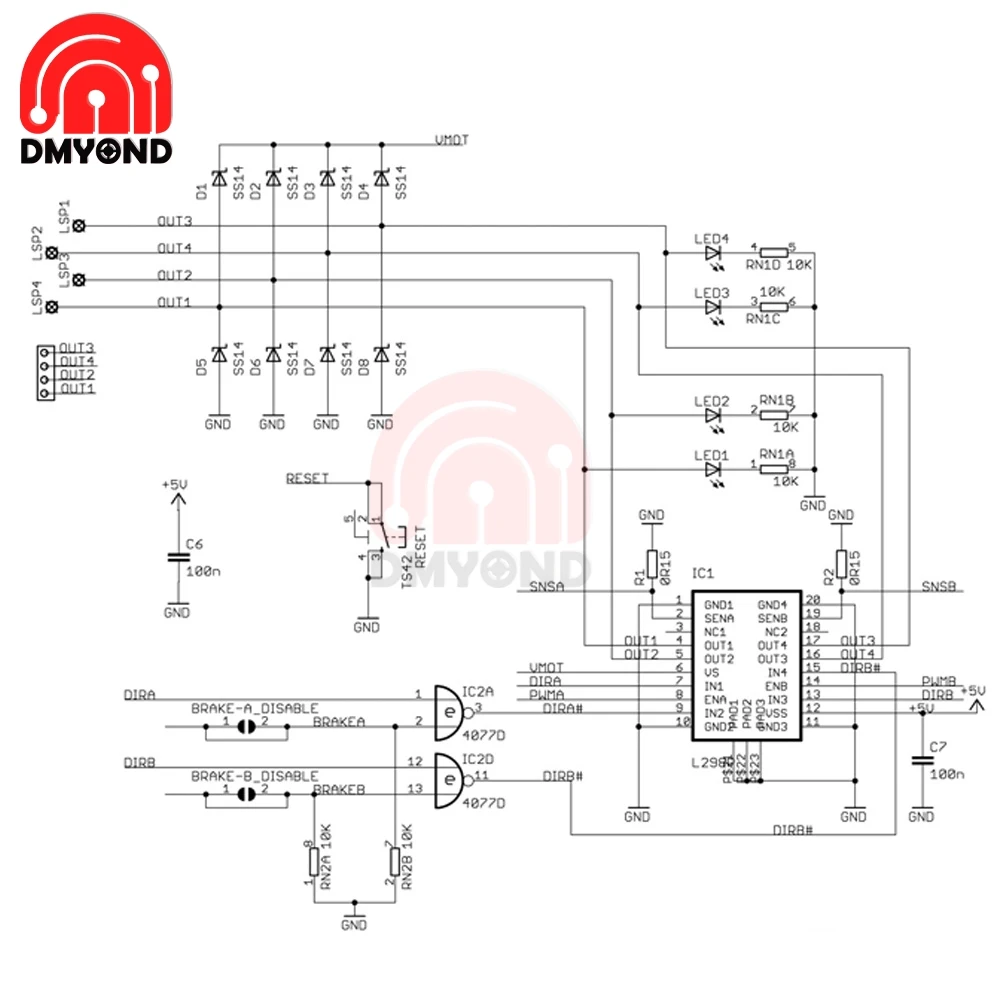
NANO Motor Shield основан на L298P, который является двойным полномостовым драйвером, предназначенным для привода индуктивных нагрузок, таких как реле, соленоиды, DC и шаговые двигатели. Он позволяет управлять двумя двигателями постоянного тока с вашей NANO платой для Arduino, контролируя скорость и направление каждого из них независимо. Вы также можете измерить поглощение тока двигателя каждого двигателя, среди других особенностей.
Вы можете найти в разделе «начало работы» всю информацию, необходимую для настройки платы, использовать программное обеспечение Arduino (IDE) и начать работать с кодированием и электроникой.Технические характеристики
Операционной Напряжение
От 5 в до 12 В
Контроллер двигателя
L298P, диски 2 двигатели постоянного тока или 1 шаговый двигатель
Максимальный ток
2а на канал или 4А Макс (с внешним источником питания)
Ток срабатывания
1,65 V/A
Бесплатная остановка хода и функция тормоза
Мощность
Наномоторный Щит должен питаться только от внешнего источника питания. Потому что IC L298, установленный на щите, имеет два отдельных подключения питания, один для логики и один для драйвера питания двигателя. Требуемый ток двигателя часто превышает максимальный ток USB.
Внешний (не-USB) Источник питания может быть либо от адаптера переменного тока в постоянный ток (настенное бородавление), либо от аккумулятора. Адаптер может быть подключен подключив в 2,1 мм Центр-положительный Подключите для Arduino доска заглушка для разъема питания, на котором двигатель щит установлен или при подключении проводов, которые приводят к источника питания на идентификационный номер транспортного средства И винтовые клеммы GND, будьте внимательны, уважайте полярности.
Чтобы избежать возможных поврежденийДляПлата Arduino, на которой установлен щит, мы возвращаем с помощью внешнего источника питания, который обеспечивает напряжение между 7 и 12 В. Если вашему двигателю требуется более 9 В, мы рекомендуем вам отделить линии электропитания щита иДляПлата Arduino, на которой установлен щит. Это возможно путем резки перемычки «Vin Connect», расположенной на задней стороне щита. Абсолютный предел для винта на винтовых клеммах составляет 18 В.
Щит может поставлять 2 Ампера на канал, в общей сложности 4 Ампера максимум.
Вход и Выход
Этот щит имеет два отдельных канала, называемых A и B, каждый из которых использует 4ДляArduino позволяет управлять или ощущать двигатель. В общей сложности на этом щите используется 8 контактов. Вы можете использовать каждый канал отдельно, чтобы управлять двумя двигателями постоянного тока или комбинировать их, чтобы управлять одним биполярным шаговым двигателем. Контакты щита, разделенные по каналам, показаны в таблице ниже:
Функция
Пин на Ch. А
Пин на Ch. B
Направление
D12
D13
PWM
D3
D11
Стоп-сигнал
D9
D8
Ток срабатывания
A0
A1
Если вам не нужен тормоз и датчик тока, а также вам нужно больше штифтов для вашего приложения, вы можете отключить эти функции, нарезав соответствующие перемычки на задней стороне щита.
Моторы соединение
Коллекторный двигатель постоянного тока. Вы можете управлять двумя щеточными двигателями постоянного тока, подключив два провода каждого в (+) и (-) винтовых клеммах для каждого канала A и B. Таким образом, вы можете контролировать его направление, установив высокий или низкий Дир A И Дир B Булавки, вы можете контролировать скорость, изменяя PWM A И PWM B Рабочий цикл значения. В Тормоза И Тормозной B Шпильки, если установить высокий уровень, эффективно тормозят двигатели постоянного тока, а не позволяют им замедляться путем резки мощности. Вы можете измерить ток, проходящий через двигатель постоянного тока, читая SNS0 И SNS1 Контактов. На каждом канале будет напряжение, пропорциональное измеренному току, которое можно считать нормальным аналоговым входом, через функцию analogRead() на аналоговом входе A0 и A1. Для Вашего удобства его настроен для того, чтобы быть 3,3 В тех случаях, когда канал осуществляет доставку грузов максимально возможной ток, то есть 2A.








Нереальная сумка??? Это просто моя любовь, тем более за свою цену. Больше она конечно подходит для весны и лета. Но... Читать отзыв полностью...

Лотос шикарный,смотрится очень красиво,вписываетс я в любой интерьер,цвет его вообще необычный.Очень люблю такие мелкие полезные штучки поэтому не смогла пройти... Читать отзыв полностью...

Немного маломерит - берите побольше размер. Из минусов это все. Нереально красивый костюм. Идеально для домашней фотосессии, тем более для... Читать отзыв полностью...

Джинсовка в стиле 00-х Ну не любовь ли?? Тем более, что она оверсайз. Хочу теперь еще и чёрную, чтобы... Читать отзыв полностью...

Купили такой мягкий диванчик нашей доске, она в восторге от него. Целыми днями сидит на нем и играет. Вживую диван... Читать отзыв полностью...

Давно искала такие коробочки. Заказала сразу несколько штук. Мне как раз нужны были такие, чтобы упаковывать свой товар. Очень понравилась... Читать отзыв полностью...








Чехлы всегда покупаю в интернете. Гораздо дешевле, а качество один в один. В магазинах бешеная наценка. Возможно они сами и... Читать отзыв полностью...